









相关推荐

产品介绍
上银KK模组特点
工业机械手臂定义为“其操作机是自动控制的,可重复编程、多用途,并可以对3个以上轴进行编程。它可以是固定式或者移动式。在工业自动化应用中使用”。操作机又定义为“是一种机器,其机构通常由一系列相互铰接或相对滑动的构件所组成。它通常有几个自由度,用以抓取或移动物体(工具或工件)。”所以对工业机械手臂可能理解为:拟人手臂、手腕和手功能 的机械电子装置;它可把任一物件或工具按空间位姿(位置和姿态)的时变要求进行移动,从而完成某一工业生产的作业要求。如夹持焊钳或焊枪,对汽车或摩托车车体进行了点焊或弧焊;搬运压铸或冲压成型的零件或构件;进行激光切割;喷涂;装配机械零部件等等。
工业机械手臂目前还没有统一的分类标准。根据不同的要求可进行不同的分类。按驱动方式分:
1.液压式工业机械臂 液压驱动工业机械手臂通常由液动机(各种油缸、油马达)、伺服阀、油泵、油箱等组成驱动系统,由驱动机械臂的执行机构进行工作。通常它具有很大的抓举能力(高达几百公斤以上),其特点是结构紧凑,动 作平稳,耐冲击,耐振动,防爆性好,但液压元件要求有较高的制造精度和密封性能,否则漏油将污染环境。
2.气动式工业机械臂 其驱动系统通常由气缸、气阀、气罐和空压机组成,其特点是气源方便,动作迅速、结构简单、造价较低、维修方便。但难以进行速度控制,气压不可太高,故抓举能力较低。
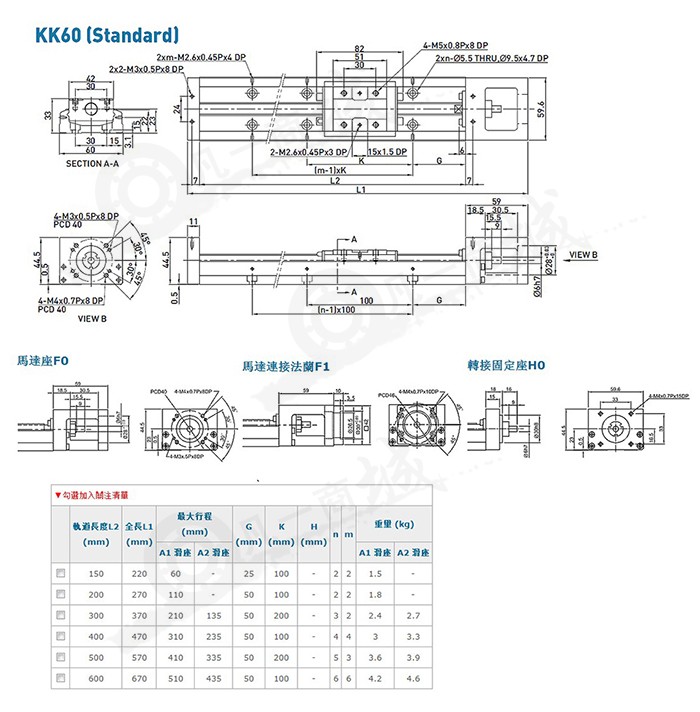
(1)多工设计:整合驱动用的滚珠螺杆及导引用U型轨道,除提供精密直线运动,也能搭配多功能配件。在导入多用途的应用设计时非常方便,也能达成高精密线性传动的需求。
(2)体积小重量轻: U型轨道可当导引轨道,亦用搭平台结构,大幅缩小安装体积,并以有限元素法设计出最佳化结构,得到最佳刚性与重量比例。低扭力与低惯量的平顺定位运动,可减少能源耗用。
(3)高精度与高刚性:籍由各方向的荷重对钢珠接触位置的变形量分析,得知此精密线性模组具高精度与高刚性的特性。以有限元素法的最佳化结构设计,得到最佳刚性与重量比例。
(4)检测容易与配备齐全:定位精度、定位重现性、行走平行度及起动扭力等功能容易检测。
(5)组装便利与维护容易:组装人员不需专业熟手可以组装完成。良好的防尘与润滑,容易维护保养,提供机台报废后的再生利用。
特征
设计及安装容易、体积小重量轻、高精度、高刚性、配备齐全、最适化设计
应用
FPD产业、半导体产业三、医疗自动化产业、面板传送定位、检测或试验环境、食品机构设备
工业机械手臂定义为“其操作机是自动控制的,可重复编程、多用途,并可以对3个以上轴进行编程。它可以是固定式或者移动式。在工业自动化应用中使用”。操作机又定义为“是一种机器,其机构通常由一系列相互铰接或相对滑动的构件所组成。它通常有几个自由度,用以抓取或移动物体(工具或工件)。”所以对工业机械手臂可能理解为:拟人手臂、手腕和手功能 的机械电子装置;它可把任一物件或工具按空间位姿(位置和姿态)的时变要求进行移动,从而完成某一工业生产的作业要求。如夹持焊钳或焊枪,对汽车或摩托车车体进行了点焊或弧焊;搬运压铸或冲压成型的零件或构件;进行激光切割;喷涂;装配机械零部件等等。
工业机械手臂目前还没有统一的分类标准。根据不同的要求可进行不同的分类。按驱动方式分:
1.液压式工业机械臂 液压驱动工业机械手臂通常由液动机(各种油缸、油马达)、伺服阀、油泵、油箱等组成驱动系统,由驱动机械臂的执行机构进行工作。通常它具有很大的抓举能力(高达几百公斤以上),其特点是结构紧凑,动 作平稳,耐冲击,耐振动,防爆性好,但液压元件要求有较高的制造精度和密封性能,否则漏油将污染环境。
2.气动式工业机械臂 其驱动系统通常由气缸、气阀、气罐和空压机组成,其特点是气源方便,动作迅速、结构简单、造价较低、维修方便。但难以进行速度控制,气压不可太高,故抓举能力较低。
3.电动式工业机械臂 电力驱动是目前工业机械臂使用得最多的一种驱动方式。其特点是电源方便,响应快,驱动力较大(关节型的持重已达400公斤),信号检测、传递、处理方便,并可以采用多种灵活的控制方案。驱动电机一般采用步进电机,直流伺服电机以及交流伺服电机(其中交流伺服电机为目前主要的驱动形式)。由于电机速度高,通常采用减速机构(如谐波传动、RV摆线针轮传动、齿轮传动、螺旋行动和多杆式机构等)。
目前,有些工业机械手臂已开始采用无减速机构的大转矩、低转速的电机进行直接驱动(DD),这既可以使机构简化,又可提高控制精度。
上一个:线性模组KK6005C-200A1-F0
下一个:KK6005C-400A1-F0
带*项为必填项目咨询:KK6005C-300A1-F0工业机械手臂
评价/咨询
暂无评价/留言!欢迎留言。